使用键盘控制只能进行固定速度控制,可通过 PC 无线游戏手柄的摇杆进行调速控制,实现更精细的控制。 使用方法:
1、使用前请先将手柄usb接收器插入电脑。
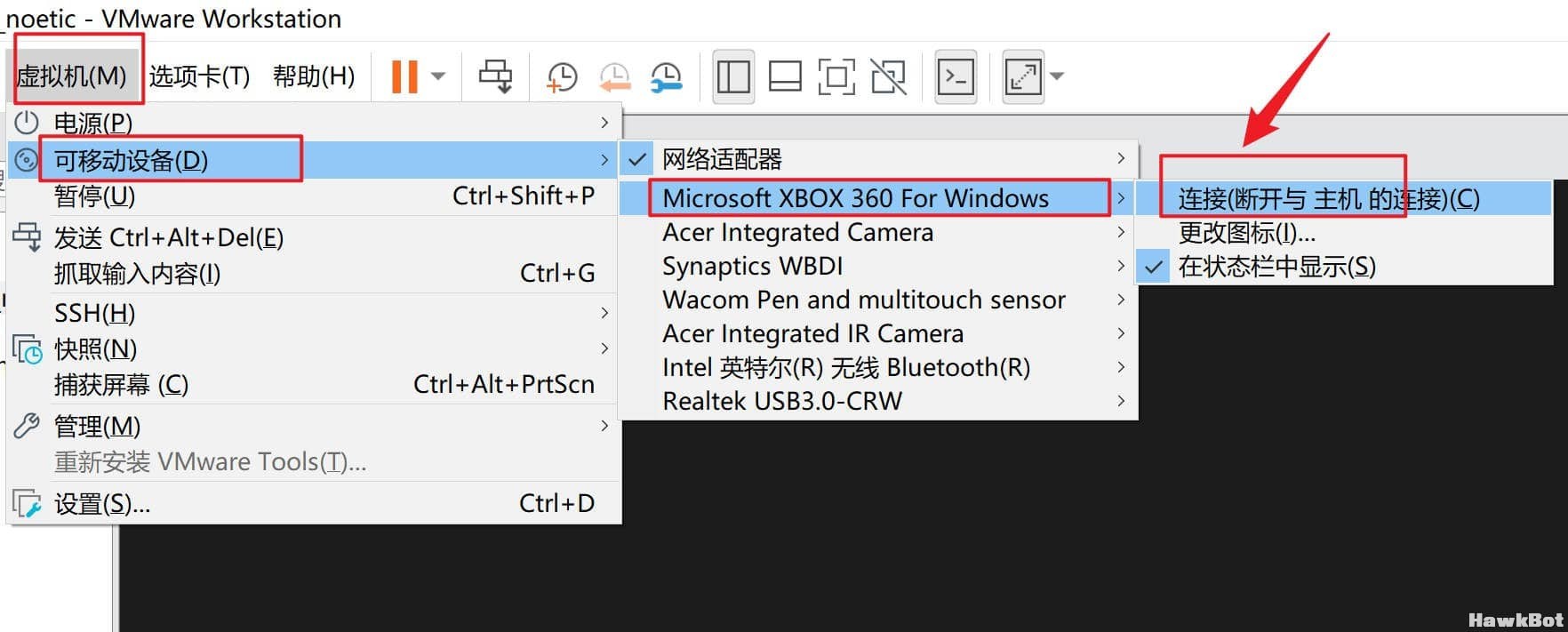
2、虚拟机正常启动后,把usb适配器硬件导入到虚拟机中,如下图: (和不同批次手柄或者、电脑系统有关,最新批次为ShenZhen hanWan PC/PS3/Android)
手工命令行模式:
启动手柄控制功能包,打开一个新的终端,输入命令:
ubuntu@Ubuntu-Ros2:~/ros2_ws$ ros2 launch teleop_twist_joy teleop-launch.py
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2026-06-20-10-57-00-982739-Ubuntu-Ros2-360776
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [joy_node-1]: process started with pid [360779]
[INFO] [teleop_node-2]: process started with pid [360780]
[teleop_node-2] [INFO] [1781924221.065188353] [TeleopTwistJoy]: Teleop enable button 6.
[teleop_node-2] [INFO] [1781924221.065223464] [TeleopTwistJoy]: Linear axis x on 1 at scale 0.200000.
[teleop_node-2] [INFO] [1781924221.065229339] [TeleopTwistJoy]: Angular axis yaw on 0 at scale 1.000000.
[joy_node-1] [INFO] [1781924224.244295945] [joy_node]: No haptic (rumble) available, skipping initialization
[joy_node-1] [INFO] [1781924224.244765203] [joy_node]: Opened joystick: ShanWan PC/PS3/Android. deadzone: 0.500000

 发表于
发表于