手工命令行模式:
打开一个新的终端,运行键盘控制节点。 ubuntu@Ubuntu-Ros2:~/ros2_ws$ ros2 run hawkbot teleop_keyboard
====================== u i o j k l m , . ====================== 前: i 后: , 左: j 右: l 左转弯:u 右转弯:o 左后退:m 右后退:. 增加/减少线速度: w/x 增加/减少角速度: e/c 退出: CTRL-C
当前速度: speed 0.15 turn 1.00
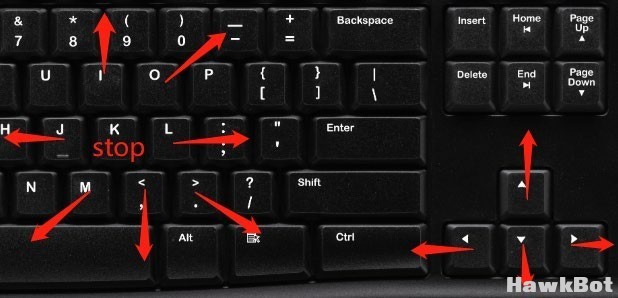
键盘控制各个键说明如下图。
I、J、<、L——前、左、后、右 U、O、M、>——前左、前右、后左、后右q/z:最大速度增加/减少 10% w/x: 仅线性速度增加/减少 10% e/c: 仅角速度增加/减少 10% 以上控制方式为ROS 官方默认的操控方式, 特别说明:1、鼠标指针必须位于键盘控制的终端页面,否则无法使用键盘控制机器人移动。
| 
 发表于 2024-2-4 18:16:32
发表于 2024-2-4 18:16:32